



4. Bina Yönetim Sisteminin Temel Yazılım Fonksiyonları
l Ölçüm fonksiyonu
(1) Temel bilgi ölçümü: pil voltajının, akım sinyalinin ve pil paketi sıcaklığının izlenmesi. Pil yönetim sisteminin en temel işlevi, pil hücrelerinin voltajını, akımını ve sıcaklığını ölçmektir; bu, pil yönetim sisteminin tüm üst düzey hesaplamalarının ve kontrol mantığının temelini oluşturur.
(2) Yalıtım direnci tespiti: Tüm pil sistemi ve yüksek voltaj sistemi, pil yönetim sistemi tarafından yalıtım açısından test edilmelidir.
(3) Yüksek gerilim kilitleme tespiti (HVIL): Tüm yüksek gerilim sisteminin bütünlüğünü doğrulamak için kullanılır. Yüksek gerilim sistemi devresinin bütünlüğü bozulduğunda, güvenlik önlemleri devreye girer.
lTahmin fonksiyonu
(1) SOC ve SOH tahmini: temel ve en zor kısım
(2) Dengeleme: Bir dengeleme devresi aracılığıyla monomerler arasındaki SOC x kapasite dengesizliğini ayarlayın.
(3) Pil gücü sınırlaması: Pilin giriş ve çıkış gücü, farklı SOC sıcaklıklarında sınırlıdır.
lDiğer fonksiyonlar
(1) Röle kontrolü: ana +, ana -, şarj rölesi +, şarj rölesi -, ön şarj rölesi dahil
(2) Termal kontrol
(3) İletişim işlevi
(4) Arıza teşhisi ve alarmı
(5) Hata toleranslı çalışma
5.BMS'nin temel yazılım işlevleri
lÖlçüm fonksiyonu
(1) Temel bilgi ölçümü: pil voltajının, akım sinyalinin ve pil paketi sıcaklığının izlenmesi. Pil yönetim sisteminin en temel işlevi, pil hücrelerinin voltajını, akımını ve sıcaklığını ölçmektir; bu, pil yönetim sisteminin tüm üst düzey hesaplamalarının ve kontrol mantığının temelini oluşturur.
(2) Yalıtım direnci tespiti: Tüm pil sistemi ve yüksek voltaj sistemi, pil yönetim sistemi tarafından yalıtım açısından test edilmelidir.
(3) Yüksek gerilim kilitleme tespiti (HVIL): Tüm yüksek gerilim sisteminin bütünlüğünü doğrulamak için kullanılır. Yüksek gerilim sistemi devresinin bütünlüğü bozulduğunda, güvenlik önlemleri devreye girer.
lTahmin fonksiyonu
(1) SOC ve SOH tahmini: temel ve en zor kısım
(2) Dengeleme: Bir dengeleme devresi aracılığıyla monomerler arasındaki SOC x kapasite dengesizliğini ayarlayın.
(3) Pil gücü sınırlaması: Pilin giriş ve çıkış gücü, farklı SOC sıcaklıklarında sınırlıdır.
lDiğer fonksiyonlar
(1) Röle kontrolü: ana +, ana -, şarj rölesi +, şarj rölesi -, ön şarj rölesi dahil
(2) Termal kontrol
(3) İletişim işlevi
(4) Arıza teşhisi ve alarmı
(5) Hata toleranslı çalışma
6.BMS yazılım mimarisi
lYüksek ve düşük voltaj yönetimi
Normalde açıkken, BMS, VCU tarafından 12V'luk bir hat veya CAN sinyali ile uyandırılır. BMS kendi kendini kontrol ettikten ve bekleme moduna girdikten sonra, VCU yüksek voltaj komutu gönderir ve BMS, yüksek voltaj bağlantısını tamamlamak için rölenin kapanmasını kontrol eder. Kapalıyken, VCU düşük voltaj komutu gönderir ve ardından 12V uyandırma bağlantısını keser. Tabanca, kapalı durumdayken şarj için takıldığında, CP veya A+ sinyali ile uyandırılabilir.
lŞarj yönetimi
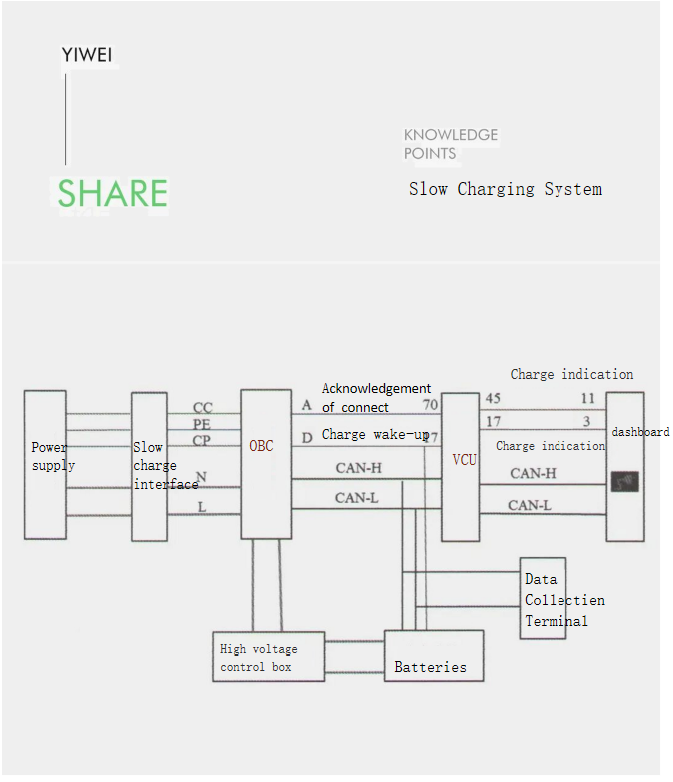
(1) Yavaş şarj
Yavaş şarj, şarj istasyonunun (veya 220V güç kaynağının) dahili şarj cihazı tarafından alternatif akımdan doğru akıma dönüştürülen akımla bataryayı şarj etmektir. Şarj istasyonu özellikleri genellikle 16A, 32A ve 64A'dır ve ev tipi güç kaynağıyla da şarj edilebilir. BMS, CC veya CP sinyaliyle uyandırılabilir, ancak şarj tamamlandıktan sonra normal şekilde uyku moduna geçebildiğinden emin olunmalıdır. AC şarj işlemi nispeten basittir ve ayrıntılı ulusal standartlara uygun olarak geliştirilebilir.
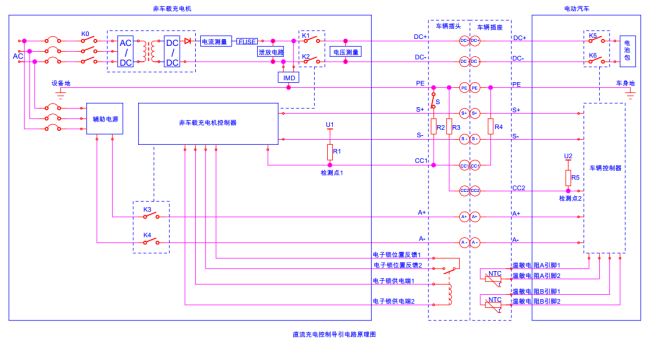
(2) Hızlı şarj
Hızlı şarj, DC şarj istasyonunun doğru akım çıkışıyla pili şarj etme işlemidir ve 1C veya daha yüksek şarj hızına ulaşabilir. Genellikle, pilin %80'i 45 dakikada şarj edilebilir. Şarj istasyonunun A+ sinyali ile aktif hale getirilebilir.
lTahmin fonksiyonu
(1) SOP (Güç Durumu), esas olarak sıcaklık ve SOC üzerinden tablolara bakarak mevcut bataryanın şarj ve deşarj gücünü elde eder. VCU, gönderilen güç değerine göre tüm aracın nasıl kullanılacağını belirler.
(2) SOH (Sağlık Durumu), esas olarak pilin mevcut sağlık durumunu %0-100 arasında bir değerle karakterize eder. Genellikle pilin %80'in altına düştükten sonra kullanılamayacağı kabul edilir.
(3) SOC (Şarj Durumu), BMS'nin çekirdek kontrol algoritmasına aittir ve mevcut kalan kapasite durumunu karakterize eder. Esas olarak amper-saat integral yöntemi ve EKF (genişletilmiş Kalman filtresi) algoritmasına dayanır ve düzeltme stratejileriyle (açık devre voltajı düzeltmesi, tam şarj düzeltmesi, şarj sonu düzeltmesi, farklı sıcaklıklar ve SOH altında kapasite düzeltmesi vb.) birleştirilir.
(4) SOE (Enerji Durumu) algoritması, yerli üreticiler tarafından yaygın olarak geliştirilmemiştir veya mevcut durumdaki kalan enerjinin maksimum kullanılabilir enerjiye oranını elde etmek için nispeten basit algoritmalar kullanır. Bu fonksiyon esas olarak kalan seyir menzilini tahmin etmek için kullanılır.
lArıza teşhisi
Pil performansına göre farklı arıza seviyeleri belirlenir ve BMS ile VCU, farklı arıza seviyelerinde uyarılar, güç sınırlaması veya yüksek voltajın doğrudan kesilmesi gibi farklı işlem önlemleri alır. Arızalar arasında veri toplama ve mantıksal hatalar, elektriksel hatalar (sensörler ve aktüatörler), iletişim hataları ve pil durumu hataları vb. yer alır.
1.BMS'nin temel yazılım işlevleri
lÖlçüm fonksiyonu
(1) Temel bilgi ölçümü: pil voltajının, akım sinyalinin ve pil paketi sıcaklığının izlenmesi. Pil yönetim sisteminin en temel işlevi, pil hücrelerinin voltajını, akımını ve sıcaklığını ölçmektir; bu, pil yönetim sisteminin tüm üst düzey hesaplamalarının ve kontrol mantığının temelini oluşturur.
(2) Yalıtım direnci tespiti: Tüm pil sistemi ve yüksek voltaj sistemi, pil yönetim sistemi tarafından yalıtım açısından test edilmelidir.
(3) Yüksek gerilim kilitleme tespiti (HVIL): Tüm yüksek gerilim sisteminin bütünlüğünü doğrulamak için kullanılır. Yüksek gerilim sistemi devresinin bütünlüğü bozulduğunda, güvenlik önlemleri devreye girer.
lTahmin fonksiyonu
(1) SOC ve SOH tahmini: temel ve en zor kısım
(2) Dengeleme: Bir dengeleme devresi aracılığıyla monomerler arasındaki SOC x kapasite dengesizliğini ayarlayın.
(3) Pil gücü sınırlaması: Pilin giriş ve çıkış gücü, farklı SOC sıcaklıklarında sınırlıdır.
lDiğer fonksiyonlar
(1) Röle kontrolü: ana +, ana -, şarj rölesi +, şarj rölesi -, ön şarj rölesi dahil
(2) Termal kontrol
(3) İletişim işlevi
(4) Arıza teşhisi ve alarmı
(5) Hata toleranslı çalışma
2.BMS yazılım mimarisi
lYüksek ve düşük voltaj yönetimi
Normalde açıkken, BMS, VCU tarafından 12V'luk bir hat veya CAN sinyali ile uyandırılır. BMS kendi kendini kontrol ettikten ve bekleme moduna girdikten sonra, VCU yüksek voltaj komutu gönderir ve BMS, yüksek voltaj bağlantısını tamamlamak için rölenin kapanmasını kontrol eder. Kapalıyken, VCU düşük voltaj komutu gönderir ve ardından 12V uyandırma bağlantısını keser. Tabanca, kapalı durumdayken şarj için takıldığında, CP veya A+ sinyali ile uyandırılabilir.
lŞarj yönetimi
(1) Yavaş şarj
Yavaş şarj, şarj istasyonunun (veya 220V güç kaynağının) dahili şarj cihazı tarafından alternatif akımdan doğru akıma dönüştürülen akımla bataryayı şarj etmektir. Şarj istasyonu özellikleri genellikle 16A, 32A ve 64A'dır ve ev tipi güç kaynağıyla da şarj edilebilir. BMS, CC veya CP sinyaliyle uyandırılabilir, ancak şarj tamamlandıktan sonra normal şekilde uyku moduna geçebildiğinden emin olunmalıdır. AC şarj işlemi nispeten basittir ve ayrıntılı ulusal standartlara uygun olarak geliştirilebilir.
(2) Hızlı şarj
Hızlı şarj, DC şarj istasyonunun doğru akım çıkışıyla pili şarj etme işlemidir ve 1C veya daha yüksek şarj hızına ulaşabilir. Genellikle, pilin %80'i 45 dakikada şarj edilebilir. Şarj istasyonunun A+ sinyali ile aktif hale getirilebilir.
lTahmin fonksiyonu
(1) SOP (Güç Durumu), esas olarak sıcaklık ve SOC üzerinden tablolara bakarak mevcut bataryanın şarj ve deşarj gücünü elde eder. VCU, gönderilen güç değerine göre tüm aracın nasıl kullanılacağını belirler.
(2) SOH (Sağlık Durumu), esas olarak pilin mevcut sağlık durumunu %0-100 arasında bir değerle karakterize eder. Genellikle pilin %80'in altına düştükten sonra kullanılamayacağı kabul edilir.
(3) SOC (Şarj Durumu), BMS'nin çekirdek kontrol algoritmasına aittir ve mevcut kalan kapasite durumunu karakterize eder. Esas olarak amper-saat integral yöntemi ve EKF (genişletilmiş Kalman filtresi) algoritmasına dayanır ve düzeltme stratejileriyle (açık devre voltajı düzeltmesi, tam şarj düzeltmesi, şarj sonu düzeltmesi, farklı sıcaklıklar ve SOH altında kapasite düzeltmesi vb.) birleştirilir.
(4) SOE (Enerji Durumu) algoritması, yerli üreticiler tarafından yaygın olarak geliştirilmemiştir veya mevcut durumdaki kalan enerjinin maksimum kullanılabilir enerjiye oranını elde etmek için nispeten basit algoritmalar kullanır. Bu fonksiyon esas olarak kalan seyir menzilini tahmin etmek için kullanılır.
lArıza teşhisi
Pil performansına göre farklı arıza seviyeleri belirlenir ve BMS ile VCU, farklı arıza seviyelerinde uyarılar, güç sınırlaması veya yüksek voltajın doğrudan kesilmesi gibi farklı işlem önlemleri alır. Arızalar arasında veri toplama ve mantıksal hatalar, elektriksel hatalar (sensörler ve aktüatörler), iletişim hataları ve pil durumu hataları vb. yer alır.
Bize Ulaşın:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
Yayın tarihi: 12 Mayıs 2023



